ゾーントレーニング方法は、21ストロークの手法、ステージの繰り返し、または部分的な繰り返しと混同されることが多く、それ自体が非常に具体的な仮定に基づくトレーニング方法であると想定しています。
1970年代後半にブライアンジョンストンによって考案され、筋肉の負荷を最大化するために、エクササイズの完全なROMをいくつかの部分(ROM自体の幅に応じて2または3)に分割するという概念に基づいています。実際には、ROMのすべての部分(可動域)。
これは、ROMの生体力学的に最も不利な部分(明確にするのがより困難)から始まり、プログラムされた繰り返しの後、より簡単な部分に続きます。このようにして、演習の2番目の部分である理論的に簡単な(好ましい)部分はもはやそのようなものではなくなり、完全なROM実行と比較してより大きな筋肉負荷が得られます。

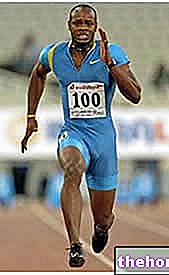
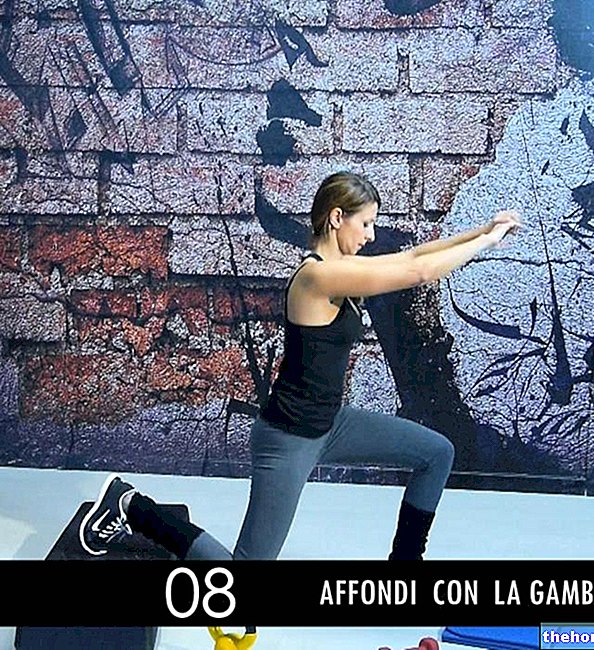
実用的な例として、座ったダンベルカールを行っている写真を見てください。生体力学的に最も不利な部分は、初期位置(腕を完全に伸ばした状態)から始めて、前腕を90度の角度に達するまで曲げた部分です。 °上腕骨で。
具体的には、ダンベルまたはバーベルカールは、「インターピボットレバー」または第1の種類のレバーの典型的な例であり、不利、中立、または有利になる可能性がありますが、生体力学的論文で読者を退屈させるつもりはありません。別の記事でそのトピックに直面します。
「ゾーントレーニング」のエクササイズで追求された結果は、より少ないセット数で筋線維のより大きな関与とその結果としての損傷を生み出すことです。これは、前述の各領域の筋肉負荷の最大化のために正確に達成されます。 ROM。
「ゾーントレーニング」方法は、それが基づいている仮定のために、HIT(またはHeavyDuty)方法論とうまく適合します。ここから、いわゆる「ハイブリッド化された」トレーニングプロトコルが開発されました。これは、強度の利益のために作業量の削減に基づいていますが、HITの「強度」技術とゾーントレーニングの技術を組み合わせたものです。
したがって、私たちは ハイブリッド これは、純粋なHITプロトコルでも、ゾーントレーニングプロトコルでもないため、両方から参加するトレーニングプログラムです。次に、個々のニーズに基づいて、特にトレーニングの優先順位に基づいて、作業プログラムの構造化においてトレーニングの内容(プレアンカーシリーズと組み合わせたトレーニングゾーン、ストリッピングまたは休憩の一時停止など)を希釈するのは技術者の責任です。全身のストレスを最小限に抑え(適切な頻度、作業量、退院期間を計画する)、適応反応を最大化しようとします。
過去10年間で、これらの方法でトレーニングした約400人のサンプルについて、独自の小規模な統計研究を開発し、筋肉量と筋力、血管分布、密度の大幅な向上を発見しました。明らかに、自然について話しているのです。アスリート、つまり化学的な助けをまったく受けないアスリートは、コルチゾールの気まぐれと、代償および超代償プロセスに必要な生理学的時間に対処する必要があります(明確にするために、仕事と強度と放電期間のサイクリングの両方が必要です綿密に計画された、アクティブおよび/またはパッシブ)。
最後に大事なことを言い忘れましたが、個人の生体力学に基づいて実行するエクササイズを選択することは基本的に重要です(ただし、これはあなたが従う方法に関係なく)、エクササイズXは必ずしも誰かの仕事Y、運動連鎖を意味するわけではないことを常に覚えています時々気まぐれで無秩序であり(冗談を言ってください)、彼らの仕事は不均衡な姿勢によって変わる可能性があります。これはしばしば私たちの経験の結果ですが、これは別の話です。
WebおよびMy-personaltrainer.itポータル(ページ下部のリンク)で私の記事を読むことをお勧めします。