FabìolaMarelli
私に必要な特定のタスクを実行するように依頼すると、自分の手が熟練していないことに意識的に気付くのは10歳のときです。
はい、もちろん、前の年でも、「キッチンで母親を助けたり、ベッドを作ったりする際に、時間的にもエグゼクティブの精度においても、明らかに3歳の妹よりも優れていることに気づきましたが、誰もが愛情を込めてニックネームを付けました。私は「お姫様」だったので、私自身もその城に追いやられていました。そこでは、することもしないことも同じ重要性を持っていました。

この2時間は私の悪夢になります。私は縫い、刺繡、かぎ針編み、そして針を使って編むのに苦労しています。
私がそれを手に入れるプロモーションの6つは、礼儀正しく、しかし不器用な思春期前の前で諦めた教師の疲労のためだけです。
私の感謝は、「次の2年間でラテン語を選び、先生を幸せな人にしてくれたことにあります。
私の家となるものの建設中に容赦なく明白な方法で「問題」が再び現れる前に15年が経過します。そこでは、ヘルパー/労働者としての私の貢献(ほとんどゼロ)により、すぐに「拳」という小さな名誉ある称号を獲得します。 de verza」(「何の役にも立たない」を意味するロンバルド語の定義)。
ツールが手から滑り落ちたり、正確に把握できなかったりします。グリップを間違えたり、力を入れすぎたり、スピードが足りなかったりします。
運動に従事していない体のいくつかの部分の過度の硬化に見られるエネルギーの本当の浪費があります。
動き(解離)をセクター化することのこの困難は、「筋力の過度の使用:正確さの代わりに力を使用することは、実際には、ほとんど常に不十分であるとしても、「不器用」と定義される人々に共通の代償戦略です。
...
活動が自動で単調であるほど、私の運動協調性は高まります。
私はいつも考えなければなりません 実行する方法 だけでなく なぜなら 私は本当にそれをしなければなりません...私は(過去と今日でも)DIYのようなそのタイプのビジネスに興味を持ったことがないので。
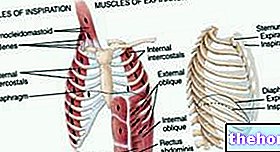
最もグローバルなものから最も細かいものまでの各動きのバランスと調整、およびオブジェクトの特性とその正確な位置への調整は、「間の関係の変化に応じて継続的に変化する緊張筋活動の結果です。体力と外界の力。
運動を制御できるようにするには、運動系は、同じ運動、つまり異なる自由度に存在する多くの可能性の中からオプションを選択する必要があります。
たとえば、テーブルの上に置かれた物体をつかむ動作では、さまざまなオステオパシー技術を使用して、肩、肘、手首のさまざまな関節を動かすことができます。
運動系は、同じ動きに関与する筋肉群に属する自由度の「圧縮」を通じて選択肢の数を減らすことによって機能します。
制御される自由度は、運動全体の自由度であり、各関節に作用する各筋肉の自由度ではありません。.
この高度に選択的な圧縮能力により、モーターの動作を、それが発生する環境コンテキストの非常に微妙な特性に合わせて調整できます。たとえば、自分と把持対象物との距離、構造特性、速度などです。ジェスチャーを実行するために必要です。
...
怒り。インポテンス。苦しむ。
私は実際の生活を扱うときに、実際の客観的な困難を抱えてきましたが、今もなお抱えています。
過小評価してはならない難しさ。理解できないときや、さらに悪いことに笑ったときに私を襲う劣等感や欲求不満の感覚と同じように、礼儀正しく親切な人を不発弾に変える可能性があります。
動きの優雅さは、一般的にいくつかの感情的な状態によって、および/または速攻、怒り、不安、内気、恐怖などの状況によって引き起こされます...あなたはバランスを失ったり、震えたり、ぎくしゃくしたり、または激しく「チャイナショップの象」。
第二部「





















.jpg)


